Шаговый двигатель подключение к arduino

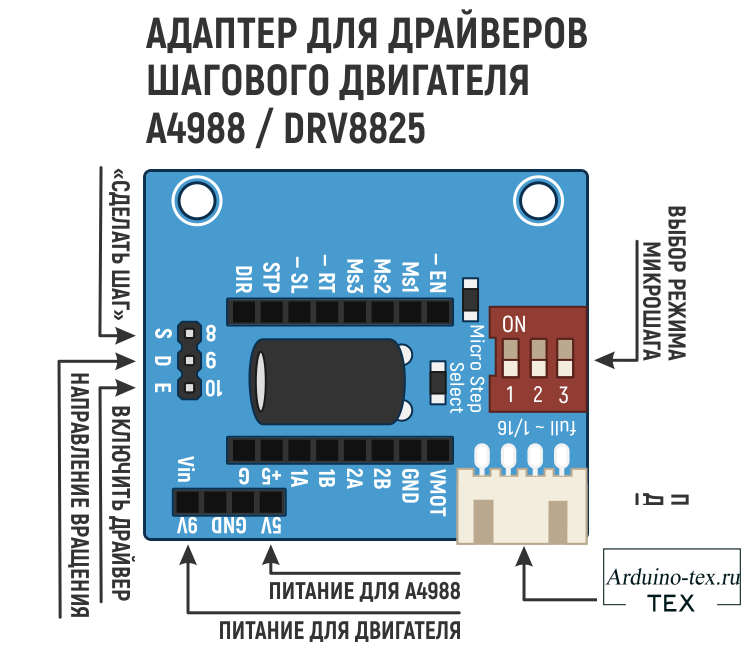
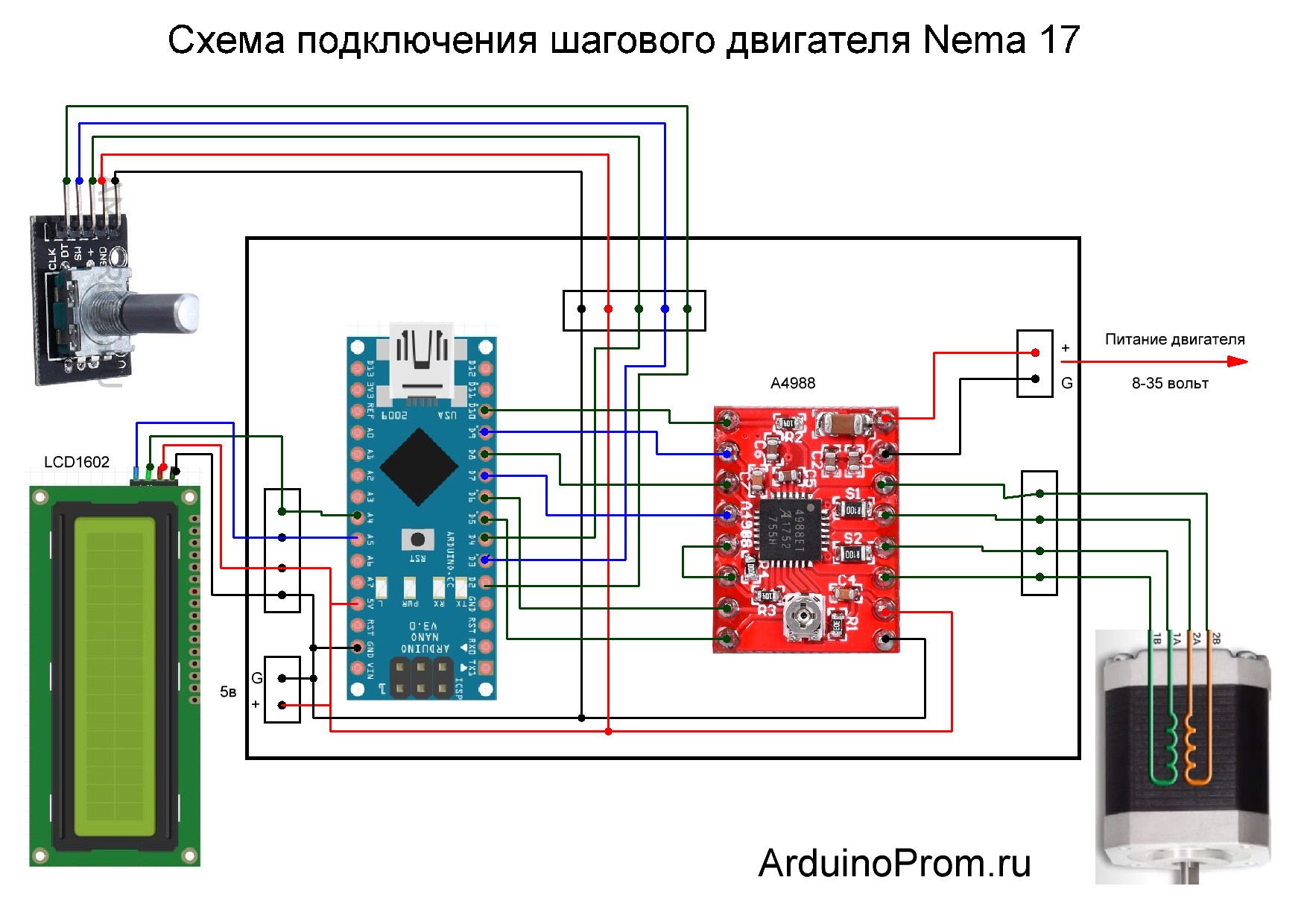
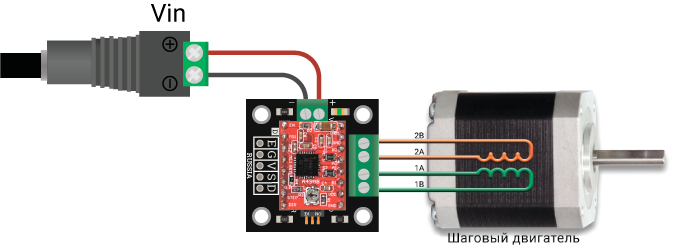
Драйвер шагового двигателя A4988. Подключения к Arduino и пример использования
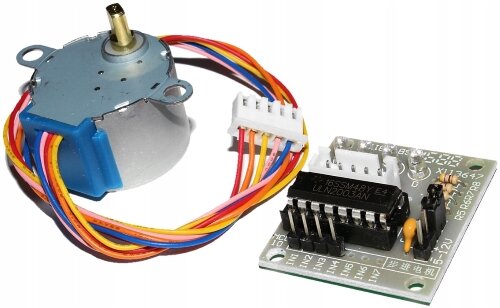
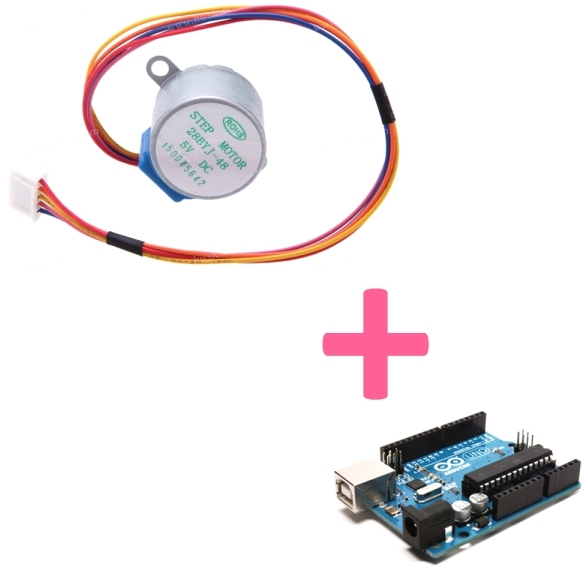
Шаговые двигатели применяют в механических системах точного позиционирования — ЧПУ станках, 3d-принтерах. Шаговые двигатели применяют в механических системах точного позиционирования — ЧПУ станках, 3d-принтерах, принтерах, роботах-манипуляторах. Шаговые двигатели преобразуют электрические импульсы в перемещение вала на определенный угол. Минимально возможный угол перемещения шагового двигателя, называется шагом. В любительской робототехнике очень часто используют бюджетный шаговый двигатель 28BYJ, в комплекте с которым продается драйвер двигателя на микросхеме ULN, необходимый для подключения шагового двигателя к плате Arduino.







с использованием библиотеки AccelStepper.")



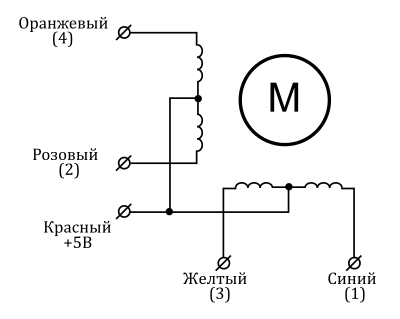
Привет, друзья! Предлагаю вам практический алгоритм, как правильно подключить обмотки шагового двигателя к драйверу. Начинающие, и не только, ардуинщики при работе с шаговыми двигателями часто сталкиваются с проблемой определения, где выводы первой обмотки, где второй, где начало первой обмотки, где второй. Так же часто возникает вопрос как проводами поменять направление вращения двигателя. Давайте в этом видео разберёмся, как с высокой степенью четкости подходить к решению этих вопросов.
![Пример Шаговый двигатель и драйвер ULN [База знаний]](https://alexgyver.ru/wp-content/uploads/2021/06/4phase.jpg)





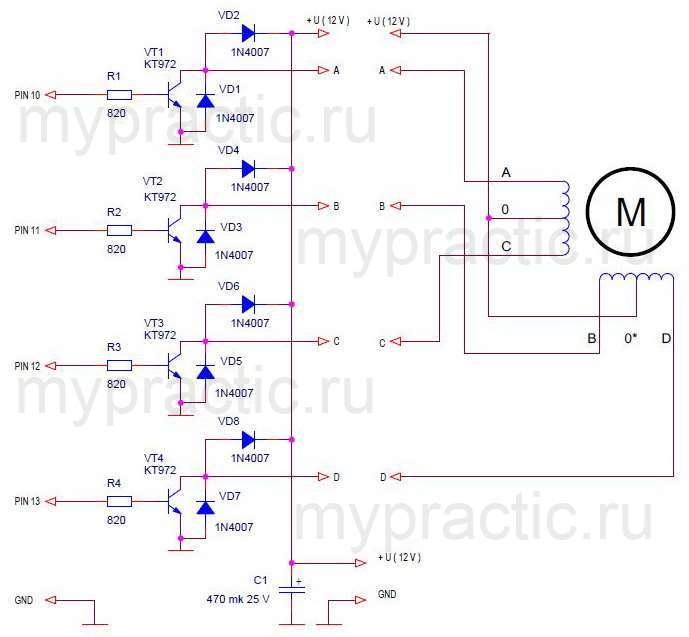
Шаговый мотор, в отличие от обычного мотора постоянного вращения, вращается пошагово и позволяет точно установить свой вал на заданный угол. В отличие от сервопривода не имеет обратной связи по углу поворота не знает, где сейчас находится вал , но зато может вращаться без ограничений. Мотор управляется через драйвер, который по сути усиливает сигнал с пинов микроконтроллера подключать моторы напрямую к пинам нельзя! Драйвер подключается к питанию 5V, а 4 управляющих входа — к любым цифровым пинам МК. Фаза мотора потребляет около мА, поэтому возможно питание драйвера напрямую от платы Arduino. В примерах на этом сайте мы будем использовать GyverStepper как самую удобную и функциональную.