Промышленная робот своими руками - Аппаратура радиоуправления моделями, роботы

Как сделать робота на ROS своими руками. Часть 1: шасси и бортовая электроника
Искусственный интеллект научился понимать речь, писать стихи и рисовать. А роботы и станки с числовым-программным управлением уже давно составляют основной фонд высокотехнологичных промышленных предприятий. На новом витке научно-технического прогресса происходит проникновение машин с цифровым управлением уже в сферу среднего и мелкого товарного производства, а также на рынок сервисных услуг. Обычно понятие промышленные роботы манипуляторы употребляют неразделимо.









Читайте наши кейсы и истории реализованных проектов по автоматизации производства, чтобы узнать как мы умеем работать. Каталог Отрасли Операции Кейсы О нас. Узнать цену.






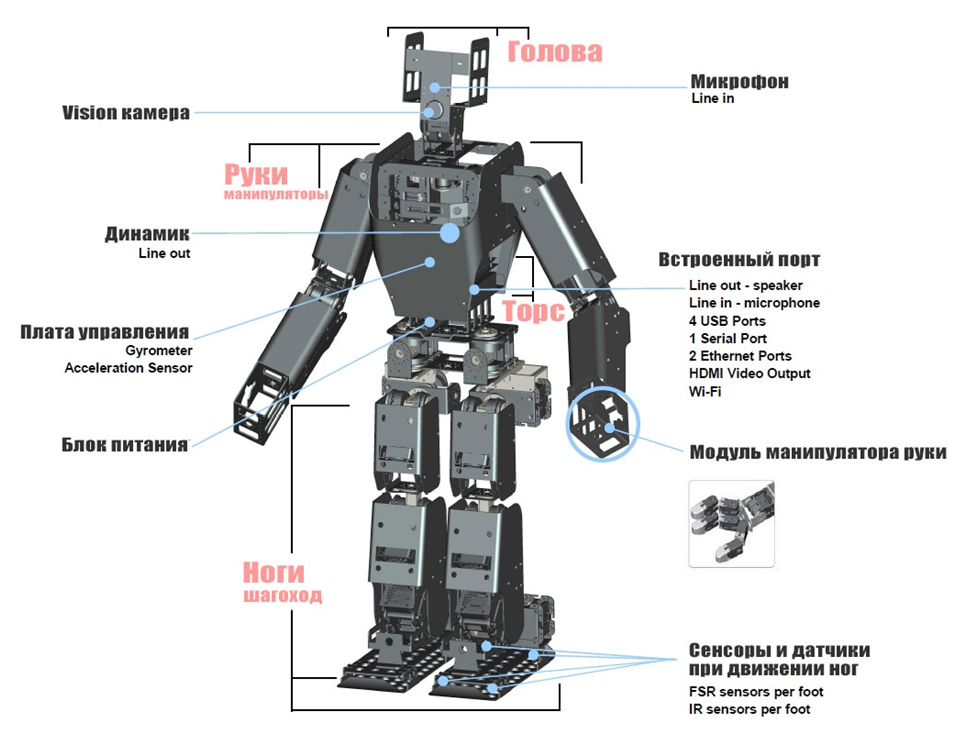
В этой статье мы на подробном примере расскажем о том, как построить настоящего робота целиком на инфракструктуре ROS — Robot Operating System. Это будет наш первый мобильный робот со своей операционной системой и первый опыт работы с ROS. Далее мы постараемся пошагово и как можно подробнее рассказать вам о процессе проектирования, конструирования и программирования робота, а также расскажем, с каким трудностями и проблемами мы столкнулись. Если вы сомневаетесь, что вам это подходит, повторите проект попроще, например робота для езды по линии.